8
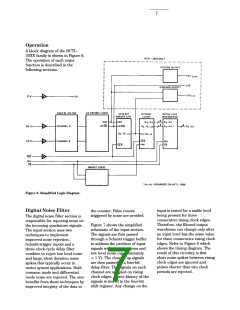
Figure 7. Simplified Digital Noise Filter Logic.
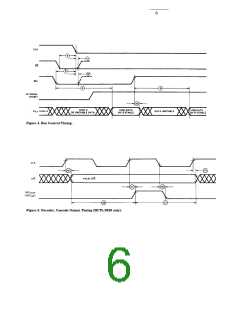
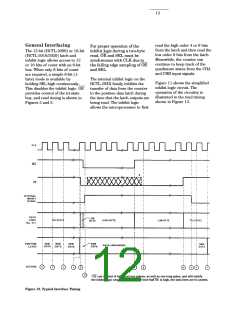
Figure 8. Signal Propagation through Digital Noise Filter.
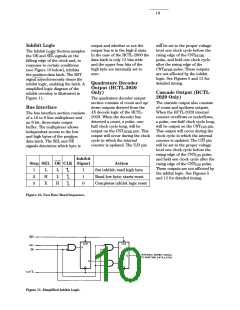
the internal position counter. In
Design Considerations
Quadrature Decoder
the case of the HCTL-2020, the
signals also go to external pins 5
and 16 respectively.
The designer should be aware
that the operation of the digital
filter places a timing constraint
on the relationship between
incoming quadrature signals and
the external clock. Figure 8
shows the timing waveform with
an incremental encoder input.
Since an input has to be stable
for three rising clock edges, the
The quadrature decoder decodes
the incoming filtered signals into
count information. This circuitry
multiplies the resolution of the
input signals by a factor of four
(4X decoding). When using an
encoder for motion sensing, the
user benefits from the increased
resolution by being able to
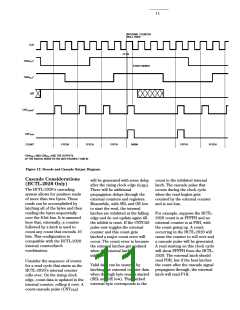
Figure 9 shows the quadrature
states and the valid state transi-
tions. Channel A leading channel
B results in counting up. Channel
B leading channel A results in
counting down. Illegal state
transitions, caused by faulty
encoders or noise severe enough
to pass through the filter, will
produce an erroneous count.
provide better system control.
encoder pulse width (t - low or
E
high) has to be greater than three
The quadrature decoder samples
the outputs of the CHA and CHB
filters. Based on the past binary
state of the two signals and the
present state, it outputs a count
signal and a direction signal to
clock periods (3t
). This
CLK
guarantees that the asynchronous
input will be stable during three
consecutive rising clock edges. A
realistic design also has to take

 AGILENT [ AGILENT TECHNOLOGIES, LTD. ]
AGILENT [ AGILENT TECHNOLOGIES, LTD. ]