TMC8462 Datasheet • Document Revision V1.4 • 2018-May -09
159 / 204
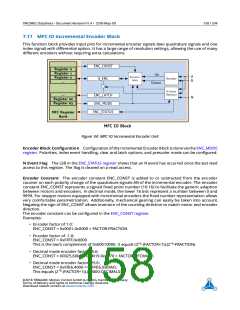
Encoder Position The encoder counter ENC_X holds the current encoder position ready for read out.
Different modes concerning handling of the signals A, B, and N take into account active low and active high
signals as found with different types of encoders.
The current encoder position can be read from MFC IO register 3.
The encoder position can also be overwritten and set to a specific value. The current encoder position can
be written to MFC IO register 2.
Latched Encoder Position When either clr_cont or clr_once are set in the ENC_MODE register, the
current encoder position from ENC_X is latched into MFC IO register 5 on an active N event.
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]