Mitsubishi microcomputers
M16C / 61 Group
SINGLE-CHIP 16-BIT CMOS MICROCOMPUTER
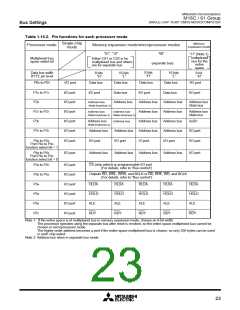
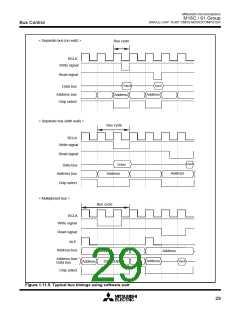
Bus Control
(6) Hold signal
The hold signal is used to transfer the bus privileges from the CPU to the external circuits. Inputting “L” to
__________
the HOLD pin places the microcomputer in the hold state at the end of the current bus access. This status
__________
__________
is maintained and “L” is output from the HLDA pin as long as “L” is input to the HOLD pin. Table 1.11.5
shows the microcomputer status in the hold state.
__________
Bus-using priorities are given to HOLD, DMAC, and CPU in order of decreasing precedence.
__________
HOLD > DMAC > CPU
Figure 1.11.4. Bus-using priorities
Table 1.11.5. Microcomputer status in hold state
Item
Status
Oscillation
ON
___
_____ _______
R/W signal, address bus, data bus, CS, BHE
Floating
Floating
Programmable I/O ports
P0, P1, P2, P3, P4, P5
P6, P7, P8, P9, P10
Maintains status when hold signal is received
Output “L”
__________
HLDA
Internal peripheral circuits
ALE signal
ON (but watchdog timer stops)
Undefined
(7) External bus status when the internal area is accessed
Table 1.11.6 shows the external bus status when the internal area is accessed.
Table 1.11.6. External bus status when the internal area is accessed
Item
SFR accessed
Address output
Internal ROM/RAM accessed
Maintain status before accessed
address of external area
Floating
Address bus
Data bus
When read
When write
Floating
Output data
Undefined
RD, WR, WRL, WRH
BHE
RD, WR, WRL, WRH output
BHE output
Output "H"
Maintain status before accessed
status of external area
Output "H"
CS
Output "H"
Output "L"
ALE
Output "L"
27

 MITSUBISHI [ Mitsubishi Group ]
MITSUBISHI [ Mitsubishi Group ]