Freescale Semiconductor, Inc.
System Description
flatten out at a current zero-crossing. So, the current sense scheme
must sense that the current waveform is approaching the zero-crossing.
Current with Correction Disabled
High Positive
Magnitude
Falling threshold
Rising threshold
Low Magnitude
High Negative
Magnitude
Dave Wilson
Figure 2-5. Proposed Current Threshold for Correction Toggling
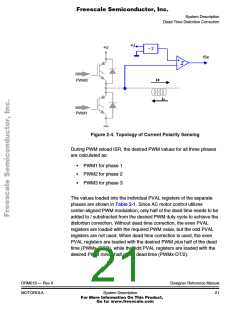
To achieve the full distortion correction, again one of two different
correction factors must be added to the desired PWM value, depending
on whether the top or bottom transistor is controlling the output voltage
during the dead time. The software is responsible for calculating both
compensated PWM values and placing them in an odd/even PWM
register pair. Then the s/w needs to determine which PWM value is to be
used, according to the following scheme:
• If the current sensed at the motor for that PWM pair is positive
and of high magnitude, or negative and of small magnitude in
a trend approaching zero crossing, the odd PWM value is
used for the PWM pair.
• Likewise, if the current sensed at the motor for that PWM pair is
negative, or positive and of small magnitude in a trend
approaching zero crossing, the even PWM value is used.
The MR32 contains a hardware circuitry that enables it to sense the
current polarity together with the magnitude. The current polarity and
magnitude is sensed using the DT-DT6 of FTACK register in ’908MR32
Designer Reference Manual
24
DRM019 — Rev 0
MOTOROLA
System Description
For More Information On This Product,
Go to: www.freescale.com

 ETC [ ETC ]
ETC [ ETC ]