GP2021
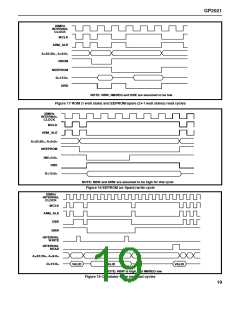
write strobe (WREN = WRSTROBE). NCS is the active
low chip select used to gate out internal data strobes.
The software associated with the GP2021 can be divided
into two separate modules:
ALE_INT= ALE_IP
WRSTROBE_INT = NCS • WREN
RDSTROBE_INT = NCS • READ
1.Acquire and track satellite signals to give pseudo-ranges
2. Process pseudo-ranges to give the navigation solution
and format it in a form suitable for the user.
INTEL 486 Style Interface (NINTELMOT = 0,
WRPROG = 1)
For the Navigation Solution to be possible all of the pseudo-
ranges must have exactly the same clock error, which can
then be removed iteratively to give real ranges if sufficient
satellites are tracked (three if the height is known, otherwise
four). This need for exact matching of timing errors explains
the need for all of the complicated synchronisation between
all 12 channels of the correlator.
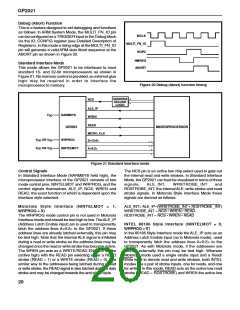
The Intel 486 style interface is similar to the 80186 style
interface, with similar separate read and write strobes.
Some of the later Intel microprocessors (notably the i486)
have a very short delay between the rising edge of ALE
and the falling edge of the read or write strobes. Due to
the pre-charged nature of the data out bus of the Correlator,
the address inputs must remain stable throughout the read
strobe, and the short delay fromALE to read strobe would
produce insufficient address setup times for correct
operation. The 486 style interface mode removes this
problem by gating both the read and write strobes such
that they are inhibited until the falling edge ofALE_IP. The
ALE_IP pin must not be tied high in 486 style interface
mode.
The following relates only to the signal processing aspects
of the software, to acquire and track signals from up to
twelve satellites and to obtain the pseudo-ranges and the
navigation message. The operation of the navigation
software is not dependent on the details of the correlator,
and so does not need to be included in this data sheet.
A pair of on-chip interrupt timebase signals are provided
to help implement a data transfer protocol between the
microprocessor and the 12-channel correlator at fixed time
intervals; these signals are:
ALE_INT= ALE_IP
WRSTROBE_INT = NCS •WREN • ALE_IP
RDSTROBE_INT = NCS • READ • ALE_IP
1. ACCUM_INT - used to interrupt the microprocessor to
retrieve accumulated data (1·023ms worth) -period of
interrupt normally less than 1ms.
2. MEAS_INT - used to interrupt the microprocessor to
retrieve Measurement data that occurs every TIC
(approximately 100ms period).
Reset
The NRESET_IP pin allows the GP2021 to be provided
with an external system reset. For further information refer
to System Reset in Standard Interface Mode.
Register Addressing
As shown in the GP2021 Register Map, Table 11, register
addresses differ from those in ARM system mode. In
particular in standard interface Mode the GP2021 address
bus interface is via A<9:2>, with NCS acting as its chip
select input. The address pinsA0,A1 inARM System Mode
now become the NRESET_IPand ALE_IP inputs. Hence,
depending upon the system configuration employed,
A<9:2>, of the GP2021 could be connected to the
microprocessor address pins A<7:0>.
These interrupts can be used to achieve instant response
from the microprocessor via an Interrupt Service Routine.
Otherwise a software based polling scheme will be needed;
the choice is set by the application. If the ACCUM_INT
interrupt is used, and perhaps also if polling is used, the
data transfer rate is about twice the correlation result rate
for each channel, so many transfers will not give new data.
Bus use can be reduced by examining the status registers
before each transfer to see if new data is available and
then only reading the data if it is useful.
SOFTWARE REQUIREMENTS
It is important to note that the timing of each ot the correlator
channels wlil be locked to its own incoming signal and not
to each other or to the microprocessor interrupts, so new
data is generated asynchronously. The sampling instant
of measurement data of all channels however is common
to give a consistent navigation solution.
The very wide variety of types of GPS receiver need to
operate the correlator in different ways. So to accommodate
this and also to allow dynamic adjustment of loop
parameters, the GP2021 has been designed to use
software for as many functions as possible. This flexibility
means that the device cannot be used without a
microprocessor closely linked to it, but as a processor is
always needed to convert the output of the GP2021 into
useful information this is not a significant limitation.
In order to acquire lock to the satellites as quickly as
possible, the data from the last fix should be stored as a
starting point for the next fix. It is also useful to make use
21

 ZARLINK [ ZARLINK SEMICONDUCTOR INC ]
ZARLINK [ ZARLINK SEMICONDUCTOR INC ]