TMC4671 Datasheet • IC Version V1.00 | Document Revision V1.04 • 2018-Dec-11
101 / 157
Address
Registername
Access
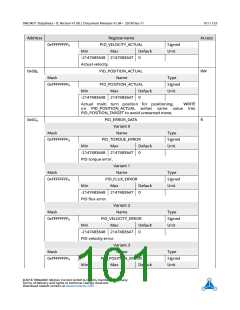
0xFFFFFFFFh
PID_VELOCITY_ACTUAL
Signed
Unit
Min
Max
Default
-2147483648 2147483647
Actual velocity.
0
0x6Bh
PID_POSITION_ACTUAL
Name
RW
Mask
Type
Signed
Unit
0xFFFFFFFFh
PID_POSITION_ACTUAL
Min
-2147483648 2147483647
Actual multi turn position for positioning.
Max
Default
0
WRITE
on PID_POSITION_ACTUAL writes same value into
PID_POSITION_TARGET to avoid unwanted move.
0x6Ch
PID_ERROR_DATA
R
Variant 0
Mask
Name
Type
Signed
Unit
0xFFFFFFFFh
PID_TORQUE_ERROR
Min
Max
Default
-2147483648 2147483647
PID torque error.
Variant 1
0
Mask
Name
Type
Signed
Unit
0xFFFFFFFFh
PID_FLUX_ERROR
Min
Max
Default
0
-2147483648 2147483647
PID flux error.
Variant 2
Mask
Name
Type
Signed
Unit
0xFFFFFFFFh
PID_VELOCITY_ERROR
Max Default
Min
-2147483648 2147483647
PID velocity error.
Variant 3
0
Mask
Name
Type
Signed
Unit
0xFFFFFFFFh
PID_POSITION_ERROR
Max Default
Min
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]