TMC248-LA DATASHEET (Rev. 1.01 / 2013-MAR-26)
7
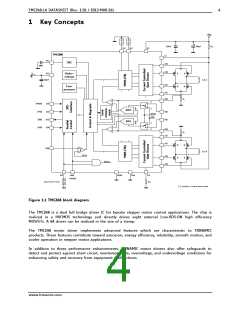
3 stallGuard - Stall Detection and Reference Search
stallGuard provides a sensorless measurement of the load on the motor. The load detection is based
on the motors back EMF of the coils. Thus, the stallGuard feature allows a digital read out of the
mechanical load on the motor via the serial interface.
stallGuard is important for:
-
-
-
finding a reference point
stall detection
predicting an overload and assuring high reliability
stallGuard is typically used for the noiseless reference search with a mechanical reference position.
The quality of the result depends on three constraints from the stepper motor and its application:
-
-
-
efficiency of a stepper motor in terms of mechanical power vs. power dissipation
difference in mechanical load between free running and stall on barrier
velocity of the stepper motor
3.1 stallGuard Measurement
The stallGuard measurement value changes linearly over a wide range of load, velocity, and current
settings. At maximum motor load, the value goes to zero or near to zero. This corresponds to a load
angle of 90° between the magnetic field of the coils and magnets in the rotor. This also is the most
energy-efficient point of operation for the motor.
The load detection level depends on several factors:
Motor velocity
A higher velocity leads to a higher readout value.
Motor resonance
Motor resonances cause a high dynamic load on the motor, and thus
measurement may give unsatisfactory results.
Motor acceleration
Mixed decay setting
Acceleration phases also produce dynamic load on the motor.
For load measurement mixed decay has to be off for some time before the
zero crossing of the coil current. If mixed decay is used, and the mixed
decay period is extended towards the zero crossing, the load indicator value
decreases.
Attention:
-
-
To get a readout value, drive the motor using sine commutation and mixed decay switched off.
The load measurement is available as a three bit load indicator during normal motion of the
motor.
-
-
A higher mechanical load on the motor results in a lower readout value.
The value is updated once per fullstep.
STALLGUARD VALUES
Bits
Description
Value Range
0
1, 2
3… 7
Highest mechanical load on motor, stall may occur.
High mechanical load on motor.
Less load on motor. A value in this range should be
achieved in a suitable velocity range under no-load
conditions, in order to get stable stall detection.
7: 100% stallGuard signal – lowest motor load.
LD2
LD1
0… 7
LD0
(unsigned 3 bit)
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]