ICM-20690
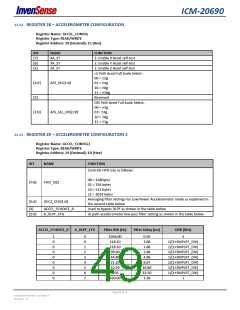
UI path gyroscope DLPF configuration:
FCHOICE_B
DLPF_CFG
Filter BW (Hz)
Filter Delay (ms)
ODR (kHz)
<1>
X
1
0
0
0
0
0
0
<0>
1
0
0
0
0
0
0
0
X
X
0
1
2
3
4
5
6
7
8800
3600
250
184
92
41
20
10
5
0.064
0.11
0.97
2.9
3.9
5.9
32
32
8
1/(1+SMPLRT_DIV)
1/(1+SMPLRT_DIV)
1/(1+SMPLRT_DIV)
1/(1+SMPLRT_DIV)
1/(1+SMPLRT_DIV)
1/(1+SMPLRT_DIV)
8
9.9
17.85
33.48
0.17
0
0
0
0
3600
Temperature sensor DLPF configuration:
DLPF_CFG
Filter BW (Hz)
NA
Filter Delay (ms)
0
1
2
3
4
5
6
7
NA
1.9
2.8
4.8
8.3
13.4
18.6
NA
188
98
42
20
10
5
NA
12.11 REGISTER 27 – GYROSCOPE CONFIGURATION
Register Name: GYRO_CONFIG
Register Type: READ/WRITE
Register Address: 27 (Decimal); 1B (Hex)
BIT
[7]
[6]
[5]
NAME
XG_ST
YG_ST
ZG_ST
FUNCTION
1: Enable X Gyro self-test
1: Enable Y Gyro self-test
1: Enable Z Gyro self-test
UI Path Gyro Full Scale Select:
000 = ±250dps
001= ±500dps
010 = ±1000dps
011 = ±2000dps
101= ±31.25dps
110 = ±62.5dps
111 = ±125dps
Used to bypass DLPF as shown in table above
[4:2]
[1:0]
FS_SEL[2:0]
FCHOICE_B[1:0]
Page 48 of 76
Document Number: DS-000178
Revision: 1.0

 TDK [ TDK ELECTRONICS ]
TDK [ TDK ELECTRONICS ]