ICM-20690
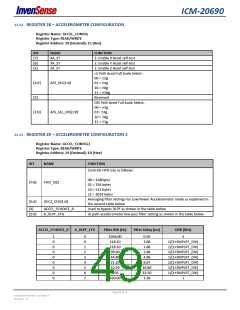
Low Power accelerometer mode averaging filter settings:
ACCEL_FCHOICE_B A_DLPF_CFG DEC2_CFG Averaging Filter
1
0
0
0
0
X
7
7
7
7
0
0
1
2
3
1x
4x
8x
16x
32x
12.14 REGISTER 30 – GYROSCOPE LOW POWER MODE CONFIGURATION
Register Name: LP_MODE_CONFIG
Register Type: READ/WRITE
Register Address: 30 (Decimal); 1E (Hex)
BIT
NAME
FUNCTION
[7]
GYRO_CYCLE
When set to ‘1’ low-power gyroscope mode is enabled. Default setting is ‘0’
Averaging filter configuration for low-power gyroscope mode. Default
setting is ‘000’
The following list shows averaging filter configurations for different settings:
000 = 1x
001 = 2x
010 = 4x
011 = 8x
100 = 16x
101 = 32x
110 = 64x
111 = 128x
Reserved
[6:4]
[3:0]
GYRO_AVGCFG[2:0]
-
To operate in gyroscope low-power mode or 6-axis low-power mode, GYRO_CYCLE should be set to ‘1.’ Gyroscope filter
configuration is determined by GYRO_AVGCFG[2:0] that sets the averaging filter configuration. It is not dependent on
DLPF_CFG[2:0].
12.15 REGISTER 32 – WAKE-ON MOTION THRESHOLD (X-AXIS ACCELEROMETER)
Register Name: ACCEL_WOM_X_THR
Register Type: READ/WRITE
Register Address: 32 (Decimal); 20 (Hex)
BIT
NAME
FUNCTION
This register holds the threshold value for the Wake on Motion Interrupt for X-axis
accelerometer.
[7:0]
WOM_X_TH[7:0]
Page 50 of 76
Document Number: DS-000178
Revision: 1.0

 TDK [ TDK ELECTRONICS ]
TDK [ TDK ELECTRONICS ]