Philips Semiconductors
PCA82C250 / 251 CAN Transceiver
Application Note
AN96116
1. INTRODUCTION
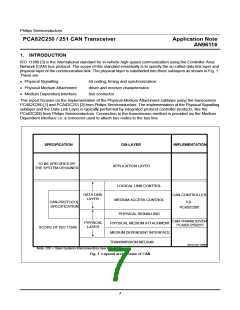
ISO 11898 [3] is the international standard for in-vehicle high-speed communication using the Controller Area
Network (CAN) bus protocol. The scope of this standard essentially is to specify the so-called data link layer and
physical layer of the communication link. The physical layer is subdivided into three sublayers as shown in Fig. 1.
These are
• Physical Signalling
bit coding, timing and synchronization
driver and receiver characteristics
bus connector
• Physical Medium Attachment
• Medium Dependent Interface
This report focuses on the implementation of the Physical Medium Attachment sublayer using the transceivers
PCA82C250 [1] and PCA82C251 [2] from Philips Semiconductors. The implementation of the Physical Signalling
sublayer and the Data Link Layer is typically performed by integrated protocol controller products, like the
PCx82C200 from Philips Semiconductors. Connection to the transmission medium is provided via the Medium
Dependent Interface i.e. a connector used to attach bus nodes to the bus line.
SPECIFICATION
OSI-LAYER
IMPLEMENTATION
TO BE SPECIFIED BY
THE SYSTEM DESIGNER
APPLICATION LAYER
LOGICAL LINK CONTROL
DATA LINK
LAYER
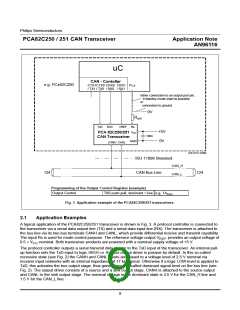
CAN-CONTROLLER
MEDIUM ACCESS CONTROL
e.g.
CAN-PROTOCOL
SPECIFICATION
PCx82C200
PHYSICAL SIGNALLING
PHYSICAL MEDIUM ATTACHMENT
MEDIUM DEPENDENT INTERFACE
TRANSMISSION MEDIUM
CAN-TRANSCEIVER
PCA82C250/251
PHYSICAL
LAYER
SCOPE OF ISO 11898
JK512191.GWM
Note: OSI = Open Systems Interconnection (see ISO 7498)
Fig. 1 Layered architecture of CAN
7

 NXP [ NXP ]
NXP [ NXP ]