KMA220
NXP Semiconductors
Dual channel programmable angle sensor
13.2 Timing characteristics
As described in the previous section, a start and stop condition is necessary for
communication. The LOW-level duration before the rising edge of the start condition is
defined as tstart. The HIGH-level duration after the rising edge of the stop condition is
defined as tstop. These parameters, together with all other timing characteristics are
shown in Table 15.
t
t
stop
start
001aag817
Fig 13. OWI start and stop condition
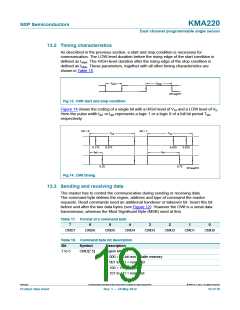
Figure 14 shows the coding of a single bit with a HIGH level of VIH and a LOW level of VIL.
Here the pulse width tw1 or tw0 represents a logic 1 or a logic 0 of a full bit period Tbit,
respectively.
bit = 0
bit = 1
T
T
bit
bit
0.175
0.375
0.625
0.825
t
t
w1
w0
0.25
0.75
001aag818
Fig 14. OWI timing
13.3 Sending and receiving data
The master has to control the communication during sending or receiving data.
The command byte defines the region, address and type of command the master
requests. Read commands need an additional handover or takeover bit. Insert this bit
before and after the two data bytes (see Figure 12). However the OWI is a serial data
transmission, whereas the Most Significant Byte (MSB) send at first.
Table 17. Format of a command byte
7
6
5
4
3
2
1
0
CMD7
CMD6
CMD5
CMD4
CMD3
CMD2
CMD1
CMD0
Table 18. Command byte bit description
Bit
Symbol
Description
7 to 5
CMD[7:5]
region bits
000 = 16-bit non-volatile memory
001 to 011 = reserved
100 = 16-bit register
101 to 111 = reserved
KMA220
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2012. All rights reserved.
Product data sheet
Rev. 1 — 24 May 2012
19 of 36

 NXP [ NXP ]
NXP [ NXP ]