KMA220
NXP Semiconductors
Dual channel programmable angle sensor
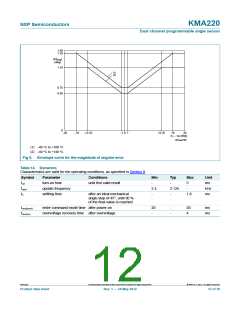
12.5 Temperature drift error
The temperature drift temp is defined as the envelope over the deviation of the angle
versus the temperature range. It is considered as the pure thermal effect.
φ
meas
(deg)
T
y
T
x
Δφ
temp
α (deg)
180
001aag816
Fig 10. Definition of the temperature drift error
Equation 2 gives the mathematical description for temperature drift value temp
:
temp() = meas(, Tx) – meas(, Ty)
(2)
with:
Tx: temperature for maximum meas at angle
Ty: temperature for minimum meas at angle
The deviation from the value at room temperature tempRT describes the temperature
drift of the angle, compared to the value, which the sensor provides at room temperature:
temp RT(, Tamb) = meas(, Tamb) – meas(, TRT
)
(3)
with:
TRT: room temperature (25 C)
12.6 Angular error
The angular error ang is the difference between mechanical angle and sensor output
during a movement from 0 to 1. Here 0 and 1 are arbitrary angles within the angular
range. The customer initially programs the angle measurement at 0 at room temperature
and zero hour upon production. The angle measurement at 1 is made at any temperature
within the ambient temperature range:
ang = meas(1, Tamb) – meas(0, TRT) – 1 – 0
(4)
with:
0, 1: arbitrary mechanical angles within the angular range
meas(0, TRT): programmed angle at 0, TRT = 25 C and zero hour upon production
meas(1, Tamb): the sensor measures angle at 1 and any temperature within Tamb
KMA220
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2012. All rights reserved.
Product data sheet
Rev. 1 — 24 May 2012
16 of 36

 NXP [ NXP ]
NXP [ NXP ]