PIC17C75X
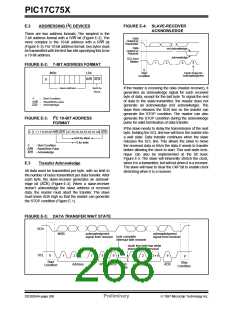
E.4
Multi-master
E.5
Clock Synchronization
2
The I C protocol allows a system to have more than
one master. This is called multi-master. When two or
more masters try to transfer data at the same time,
arbitration and synchronization occur.
Clock synchronization occurs after the devices have
started arbitration. This is performed using
a
wired-AND connection to the SCL line. A high to low
transition on the SCL line causes the concerned
devices to start counting off their low period. Once a
device clock has gone low, it will hold the SCL line low
until its SCL high state is reached.The low to high tran-
sition of this clock may not change the state of the SCL
line, if another device clock is still within its low period.
The SCL line is held low by the device with the longest
low period. Devices with shorter low periods enter a
high wait-state, until the SCL line comes high. When
the SCL line comes high, all devices start counting off
their high periods. The first device to complete its high
period will pull the SCL line low.The SCL line high time
is determined by the device with the shortest high
period, Figure E-10.
E.4.1
ARBITRATION
Arbitration takes place on the SDA line, while the SCL
line is high. The master which transmits a high when
the other master transmits a low loses arbitration
(Figure E-9), and turns off its data output stage. A mas-
ter which lost arbitration can generate clock pulses until
the end of the data byte where it lost arbitration. When
the master devices are addressing the same device,
arbitration continues into the data.
FIGURE E-9: MULTI-MASTER
ARBITRATION
(TWO MASTERS)
FIGURE E-10: CLOCK SYNCHRONIZATION
transmitter 1 loses arbitration
DATA 1 SDA
start counting
HIGH period
wait
state
DATA 1
DATA 2
SDA
CLK
1
counter
reset
CLK
2
SCL
SCL
Masters that also incorporate the slave function, and
have lost arbitration must immediately switch over to
slave-receiver mode.This is because the winning mas-
ter-transmitter may be addressing it.
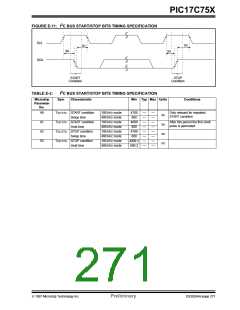
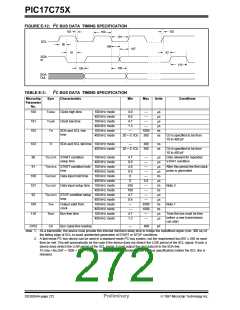
2
E.6
I C Timing Specifications
Table E-2 (Figure E-11) and Table E-3 (Figure E-12)
show the timing specifications as required by the Phil-
ips specification for I C. For additional information
Arbitration is not allowed between:
2
• A repeated START condition
please refer to to Section 15.2 and Section 20.5.
• A STOP condition and a data bit
• A repeated START condition and a STOP condi-
tion
Care needs to be taken to ensure that these conditions
do not occur.
DS30264A-page 270
Preliminary
1997 Microchip Technology Inc.

 MICROCHIP [ MICROCHIP ]
MICROCHIP [ MICROCHIP ]