C167CR
C167SR
General Purpose Timer (GPT) Unit
The GPT unit represents a very flexible multifunctional timer/counter structure which
may be used for many different time related tasks such as event timing and counting,
pulse width and duty cycle measurements, pulse generation, or pulse multiplication.
The GPT unit incorporates five 16-bit timers which are organized in two separate
modules, GPT1 and GPT2. Each timer in each module may operate independently in a
number of different modes, or may be concatenated with another timer of the same
module.
Each of the three timers T2, T3, T4 of module GPT1 can be configured individually for
one of four basic modes of operation, which are Timer, Gated Timer, Counter, and
Incremental Interface Mode. In Timer Mode, the input clock for a timer is derived from
the CPU clock, divided by a programmable prescaler, while Counter Mode allows a timer
to be clocked in reference to external events.
Pulse width or duty cycle measurement is supported in Gated Timer Mode, where the
operation of a timer is controlled by the ‘gate’ level on an external input pin. For these
purposes, each timer has one associated port pin (TxIN) which serves as gate or clock
input. The maximum resolution of the timers in module GPT1 is 16 TCL.
The count direction (up/down) for each timer is programmable by software or may
additionally be altered dynamically by an external signal on a port pin (TxEUD) to
facilitate e.g. position tracking.
In Incremental Interface Mode the GPT1 timers (T2, T3, T4) can be directly connected
to the incremental position sensor signals A and B via their respective inputs TxIN and
TxEUD. Direction and count signals are internally derived from these two input signals,
so the contents of the respective timer Tx corresponds to the sensor position. The third
position sensor signal TOP0 can be connected to an interrupt input.
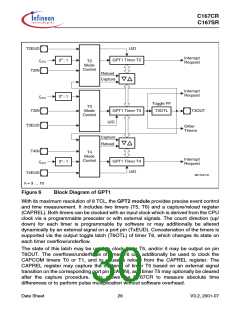
Timer T3 has an output toggle latch (T3OTL) which changes its state on each timer over-
flow/underflow. The state of this latch may be output on pin T3OUT e.g. for time out
monitoring of external hardware components, or may be used internally to clock timers
T2 and T4 for measuring long time periods with high resolution.
In addition to their basic operating modes, timers T2 and T4 may be configured as reload
or capture registers for timer T3. When used as capture or reload registers, timers T2
and T4 are stopped. The contents of timer T3 is captured into T2 or T4 in response to a
signal at their associated input pins (TxIN). Timer T3 is reloaded with the contents of T2
or T4 triggered either by an external signal or by a selectable state transition of its toggle
latch T3OTL. When both T2 and T4 are configured to alternately reload T3 on opposite
state transitions of T3OTL with the low and high times of a PWM signal, this signal can
be constantly generated without software intervention.
Data Sheet
25
V3.2, 2001-07

 INFINEON [ Infineon ]
INFINEON [ Infineon ]