TSC2005
www.ti.com
SBAS379–DECEMBER 2006
OVERVIEW (continued)
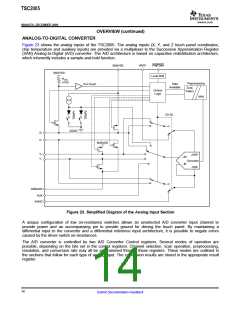
Preprocessing
The TSC2005 offers an array of powerful preprocessing operations. The goal is to reduce any unnecessary
traffic on the bus and reduce the host processor loading. This reduction is especially critical for the serial
interface, where limited bandwidth is a tradeoff, keeping the connection lines to a minimum.
All data acquisition tasks are looking for specific data that meet certain criteria. Many of these tasks fall into a
predefined range, while other tasks may be looking for a value in a noisy environment. If these data are all to be
retrieved by host processor for processing, the limited bus bandwidth will be quickly saturated, along with the
host processor processing capability. In any case, the host processor must always be reserved for more critical
tasks, not for routine work.
The preprocessing unit consists of two main functions: the combined MAV filter (median value filter and
averaging filter), followed by the zone detection.
Preprocessing - Median Value Filter and Averaging Value Filter
The first preprocessing function, a combined MAV filter, can be operated independently as a median value filter
(MVF), an averaging value filter (AVF) and a combined filter (MAVF).
If the acquired signal source is noisy because of the digital switching circuit, it may be necessary to evaluate the
data without noise. In this case, the median value filter (MVF) operation helps to discard the noise. The array of
N converted results is first sorted. The return value is either the middle (median value) of an array of M
converted results, or the average value of a window size of W of converted results:
•
•
•
N = the total number of converted results used by the MAV filter
M = the median value filter size programmed
W = the averaging window size programmed
If M = 1, then N = W. A special case is W = 1, which means the MAVF is bypassed. Otherwise, if W > 1, only
averaging is performed on these converted results. In either case, the return value is the averaged value of
window size W of converted results. If M > 1 and W = 1, then N = M, meaning only the median value filter is
operating. The return value is the middle position converted result from the array of M converted results. If M > 1
and W > 1, then N = M. In this case, W < M. The return value is the averaged value of middle portion W of
converted results out of the array of M converted results. Since the value of W is an odd number in this case,
the averaging value is calculated with the middle position converted result counted twice (so a total of W + 1
converted results are averaged).
Table 1. Median Value Filter Size Selection
MEDIAN VALUE FILTER
M =
POSSIBLE AVERAGING WINDOW SIZE
W =
M1
0
M0
0
1
3
1, 4, 8, 16
1
0
1
1
0
7
1, 3
1
1
15
1, 3, 7
Table 2. Averaging Value Filter Size Selection
AVERAGING VALUE FILTER SIZE SELECTION
W =
W1
0
W0
0
M = 1 (Averaging Only)
M > 1
1
4
1
0
1
3
7
1
0
8
1
1
16
Reserved
17
Submit Documentation Feedback

 BB [ BURR-BROWN CORPORATION ]
BB [ BURR-BROWN CORPORATION ]