TMC6200 DATASHEET (Rev. 1.01 / 2018-NOV-15)
6
1.1 Control Interfaces
The TMC6200 supports six control lines for the MOSFET drivers. High-side and low-side outputs can be
individually controlled, or by an individual enable pin plus polarity pin, using internal BBM circuitry.
An SPI interface or standalone configuration is supported.
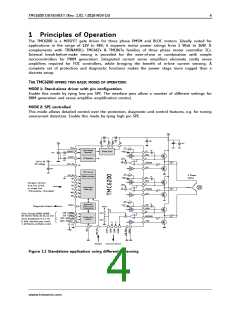
1.1.1 Standalone Configuration
Standalone configuration covers the most important settings like driver current and current amplifier
amplification factor and the selection of internal or external BBM operation using four pins. Additional
settings like BBM time and sensitivity of short detection can be modified using pre-programming via
OTP memory, e.g. via an initial programming during product testing. This way, the driver can be fully
operated and all protection mechanisms are in place. The fault output signals any critical driver error.
It becomes cleared by disabling / re-enabling the driver.
However, no advanced debugging is possible, like individual testing of failure mechanisms or setting
a more sensitive temperature threshold. Also, it is not possible to switch to 20x current amplifier
amplification.
Hint
Standalone configuration is recommended for low-cost applications with small motors (e.g. motor
current up to 10A RMS), where advanced debugging is not required or not possible. In case a
sensitive overtemperature threshold must be set, or 20x current amplifier amplification is required due
to high motor current, the SPI interface should be used.
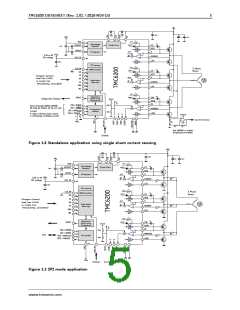
1.1.2 SPI Interface
The SPI interface is a bit-serial interface synchronous to a bus clock. For every bit sent from the bus
master to the bus slave another bit is sent simultaneously from the slave to the master.
Communication between an SPI master and the TMC6200 slave always consists of sending one 40-bit
command word and receiving one 40-bit status word.
The SPI command rate typically is a few commands for initialization or for diagnostic feedback.
Attention
When operating in SPI mode, set drive mode (single line or individual control signals) first. For safety
reasons, the driver starts up in single line mode. This setting will prevent operation if a controller
operates the IC using individual control signals. Current amplifier amplification can be set within the
same write access.
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]