Phase current control: voltage mode
powerSTEP01
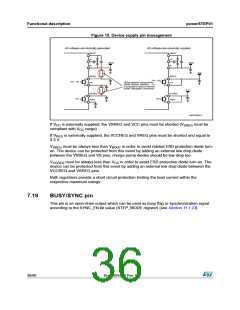
Figure 16. Current distortion and compensation
Without low speed optimizazion
Iphase
With low speed optimizazion
Iphase
Current distortion is heavily reduced
AM12851v1
The optimization can be enabled setting high the LSPD_OPT bit in the MIN_SPEED register
(Section 11.1.8) and is active in a speed range from zero to MIN_SPEED. When low speed
optimization is enabled, speed profile minimum speed is forced to zero.
8.4
BEMF compensation
Using the speed information, a compensation curve is added to the amplitude of the voltage
waveform applied to the motor winding in order to compensate the BEMF variations during
acceleration and deceleration (see Figure 17).
The compensation curve is approximated by a stacked line with a starting slope (ST_SLP)
when speed is lower than a programmable threshold speed (INT_SPEED) and a fine slope
(FN_SLP_ACC and FN_SLP_DEC) when speed is greater than the threshold speed (see
sections 11.1.11, 11.1.12, 11.1.13 and 11.1.14).
40/90
DocID025022 Rev 1

 STMICROELECTRONICS [ ST ]
STMICROELECTRONICS [ ST ]