Philips Semiconductors
Product specification
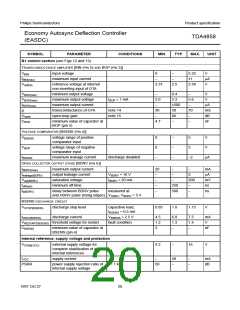
Economy Autosync Deflection Controller
(EASDC)
TDA4858
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
ADJUSTMENT OF HORIZONTAL SIZE (see Figs 3 to 8) [EWWID (PIN 32)]
VDC(EWDRV)
EW parabola DC voltage shift
IEWWID = −135 µA; note 9
EWWID = 0; note 9
−
−
−
0.1
−
−
−
V
V
I
4.2
0
IEWWID
input current for maximum DC
shift
µA
µA
V
input current for minimum DC
shift
−110
−120
−135
Vref(EWWID)
reference voltage at input
−
5.0
−
ADJUSTMENT OF TRAPEZIUM CORRECTION (see Figs 3 to 8) [EWTRP (PIN 20)]
VTRP(EWTRP)
trapezium correction voltage
IEWTRP = 0; note 9
EWTRP = −135 µA; note 9
−
−0.5
+0.5
−120
−
V
I
−
−
V
IEWTRP
input current for maximum
positive trapezium correction
−110
−135
µA
input current for maximum
−
0
−
µA
negative trapezium correction
Vref(EWTRP)
Voff(EWTRP)
reference voltage at input
−
5.0
−
V
V
trapezium correction is centred
if EWTRP (pin 20) is forced to
ground
0
−
0.1
VPARM(p-p)
amplitude of superimposed
logarithmic parabola
note 12
−
−
145
mV
(peak-to-peak value)
TRACKING OF EWDRV OUTPUT SIGNAL WITH fH PROPORTIONAL VOLTAGE
fH(MULTI)
fH range for tracking
24
−
80
kHz
V
VPAR(EWDRV)
parabola amplitude at EWDRV IHREF = 1.052 mA;
1.3
1.45
1.6
(pin 11)
fH = 31.45 kHz; note 13
HREF = 2.341 mA;
fH = 70 kHz; note 13
I
2.7
3.0
3.3
V
function disabled; note 13 2.7
3.0
−
3.3
8
V
δVEWDRV
linearity error of fH tracking
−
%
V
VEWWID
voltage range to inhibit tracking
0
−
0.1
1997 Oct 27
19

 NXP [ NXP ]
NXP [ NXP ]