CY545 Stepper System Controller
www.ControlChips.com
CHAPTER 19 - CIRCUITS AND EXAMPLES
Variable Stock Cut and Punch
Suppose we want a row of equally spaced holes punched into some raw stock, which is fed into
our machine in continuous strips. The spacing of the holes and the number of holes should be
variable for any run of pieces. The stock should be cut into strips with a length that depends on
the number of holes and spacing, and the operation should be repeated until the CY545 is
signaled to stop.
The capabilities of the CY545 make this problem fairly easy to solve. The command sequence
shown below can be used to implement all the functions required. The command sequence can
be located in external memory, where the CY545 can directly read and execute the program.
The variable information, for the number of holes and spacing between them, can be read from
thumbwheel switch inputs. The user selectable function bits act as control and test signals to
guide the program. When the operation is complete, the CY545 will stop the program and wait
for more commands.
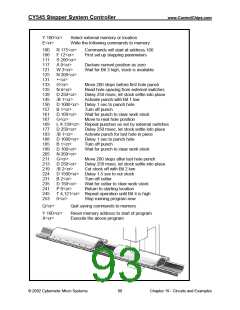
In the following command sequence, memory addresses have been shown for your
convenience. They are not sent to the CY545 or recorded in the memory. Counting the bytes as
the commands are written makes it easier to determine the addresses for program jumps.
The example program consists of several sections. First, the stepping performance parameters
are set, and the current position is cleared to zero. This position could also be found by a Home
command, if the application requires a move to a known reference position.
Next, the CY545 waits for a signal that indicates stock is available. This is tested on User Bit 3.
When stock is available, the CY545 moves the motor 200 steps from the initial position. Notice
that this move is fixed by the command in the program. Here the first move is always 200 steps.
Now the CY545 reads the external thumbwheel switches for the number of steps to move
between punching holes. This number replaces the 200 in the Number of Steps Register.
At this point, the CY545 punches the first hole, signaled by User Bit 1. When the bit goes low,
the punch is activated, and when it goes high, the punch retracts. Delays are placed around the
activation and deactivation to allow for settling time and time to perform the punching operation.
The CY545 continues by moving to the next hole position, as previously set by the N #<cr>
command. It then executes the Loop command, which reads the repeat count from external
thumbwheel switches, and jumps back to the Delay instruction at the start of the hole punch
sequence. This sequence is repeated until the count is exhausted, and the specified number of
holes has been punched.
© 2002 Cybernetic Micro Systems
87
Chapter 19 - Circuits and Examples

 ETC [ ETC ]
ETC [ ETC ]