CY545 Stepper System Controller
www.ControlChips.com
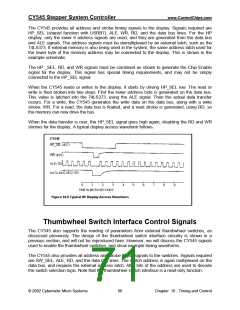
from the starting rate to the slew rate, then run indefinitely at this rate. There are no specific
number of steps to move or target position to stop at. However, the current position is still
updated during the motion, and may be queried when the CY545 has stopped again. The
INHIBIT_ABORT signal is used to end the continuous motion. The SLEW signal is tested just
before the CY545 begins the first step of a motion.
Alternatively, the continuous mode may also be selected by the Continuous command. This
should be followed by a Go command to actually start the motion. The INHIBIT_ABORT signal
is still used to end the motion. Continuous mode stepping is disabled at the end of every motion,
so if a second motion is desired in continuous mode, another Continuous command must be
issued, or the SLEW signal must be driven low before the motion starts.
INHIBIT_ABORT
The INHIBIT_ABORT signal is a stepping control input to the CY545, with a number of
functions. In general, it is used to override the normal stepping behavior of the CY545, as
selected by the CY545 commands.
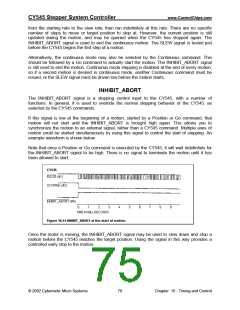
If this signal is low at the beginning of a motion, started by a Position or Go command, that
motion will not start until the INHIBIT_ABORT is brought high again. This allows you to
synchronize the motion to an external signal, rather than a CY545 command. Multiple axes of
motion could be started simultaneously by using this signal to control the start of stepping. An
example waveform is shown below.
Note that once a Position or Go command is executed by the CY545, it will wait indefinitely for
the INHIBIT_ABORT signal to be high. There is no signal to terminate the motion until it has
been allowed to start.
Once the motor is moving, the INHIBIT_ABORT signal may be used to slow down and stop a
motion before the CY545 reaches the target position. Using the signal in this way provides a
controlled early stop to the motion.
© 2002 Cybernetic Micro Systems
70
Chapter 16 - Timing and Control

 ETC [ ETC ]
ETC [ ETC ]