CY545 Stepper System Controller
www.ControlChips.com
The Home command starts by testing the specified bit pattern for a match with the external
signals. If there is a match, the CY545 will begin by stepping in the CCW direction, and will
continue in this direction until there is no longer a match. The CCW stepping phase is skipped if
the initial test indicates no match between the argument bit pattern and the external signals.
When there is no match between the bit parameter and the external signals, the CY545 steps in
the CW direction. It will continue to step in this direction until the signals match the parameter
value. At this point the CY545 stops, and sets the current position to zero.
Thus, the Home command steps the motor to seek the edge between a match and no match
condition on the home signal. The CY545 then stops at the first step where a match occurs, and
is always stepping in the CW direction looking for this match. This mechanism should always
seek the same mechanical position, since any directional backlash is compensated for by using
the same final step direction in seeking home.
If the CY545 runs into one of the limits while looking for the home signal, it will abort the home
command and stop stepping. The current position is not changed to zero in this case. As with
the jog function, the current position will be displayed after every step, if bit 4 of the Mode
Register is set.
Some care must be used in designing the home sensor signal for the CY545, to insure that it
initially steps in the correct direction to seek the home signal. If the application involves a
circular positioning function, in which the mechanism rotates a wheel or turntable, there is no
special consideration, since the mechanical positions will always repeat after some number of
steps. The CY545 can find the home sensor signal no matter what direction it starts to step.
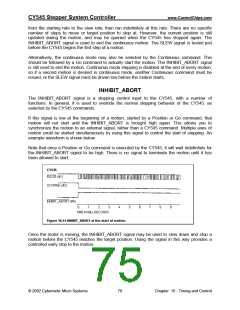
However, if the application involves a linear displacement, the mechanical home position can
only be found by stepping in one direction, depending on the relative position between the
mechanical home and the current position. In this case, the sensor signal should be designed to
indicate the direction to home, as well as the actual home position, found by the change in
signal from no match to match conditions. This is illustrated below:
If the home sensor signal cannot be designed to indicate the initial direction to home, the motor
must be positioned so that it is on the “correct” side of home before the Home command is
used. This will insure that the CY545 always steps towards the sensor on seeking the home
position. The CW and CCW limits might be useful in this situation, since you could move to a
known limit, then use the home command to step in the opposite direction until the home
position is found.
© 2002 Cybernetic Micro Systems
74
Chapter 16 - Timing and Control

 ETC [ ETC ]
ETC [ ETC ]