Philips Semiconductors
Product specification
I2C-bus autosync deflection controller for
PC monitors
TDA4856
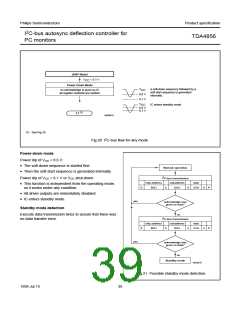
Protection and standby mode
Soft-down sequence:
L4
• Start the sequence by setting control bit SOFTST = 0
• BDRV duty cycle decreases
S
8CH
A
1AH
A
00H
A P
• HDRV duty cycle decreases.
Soft-down sequence (XXXX XX00)
Protection mode:
STDBY = 0
• Pins HDRV and BDRV are floating
• Continuous blanking at pin CLBL is active
• Pin HUNLOCK is floating
SOFTST = 0
Protection mode (XXXX XX00)
STDBY = 0
SOFTST = 0
registers are set
• PLL1 and PLL2 are disabled
• Register contents are kept in internal memory.
Protection mode can be left by 3 ways:
1. Entering standby mode by setting control
bit SOFTST = 0 and control bit STDBY = 1
no
no
STDBY = 1?
yes
SOFTST = 1?
yes
2. Starting the soft-start sequence by setting control
bit SOFTST = 1 (bit STDBY = don’t care);
see L3 of Fig.18 for continuation
(1)
L3
3. Decreasing the supply voltage below 8.1 V.
S
8CH
A
1AH
A
01H
A P
Standby mode:
• Set control bit STDBY = 1
Standby mode (XXXX XX01)
• Driver outputs are floating (same as protection mode)
STDBY = 1
SOFTST = 0
all other register contents are random
• Supply current is 9 mA
• Only the I2C-bus section and protection circuits are
operative
(1)
L2
MGL790
• Contents of all registers except the value of bit STDBY
and bit SOFTST are lost
(1) See Fig.18.
• See L2 of Fig.18 for continuation.
Fig.19 I2C-bus flow for protection and standby
mode.
1999 Jul 13
38

 NXP [ NXP ]
NXP [ NXP ]