Philips Semiconductors
Product specification
CAN controller interface
PCA82C250
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
100
UNIT
kΩ
Rdiff
Ci
differential input resistance
CANH, CANL input capacitance
differential input capacitance
20
−
−
−
−
20
10
pF
pF
Cdiff
−
Reference output
Vref
reference output voltage
V8 = 1 V;
−50 µA < I5 < 50 µA
0.45VCC
0.4VCC
−
−
0.55VCC
0.6VCC
V
V
V8 = 4 V;
−5 µA < I5 < 5 µA
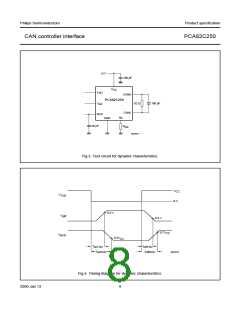
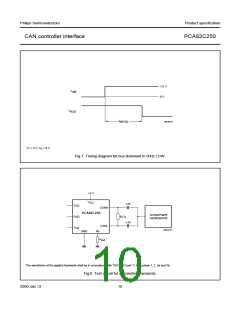
Timing (see Figs 4, 6 and 7)
tbit
minimum bit time
V8 = 1 V
V8 = 1 V
V8 = 1 V
V8 = 1 V
−
−
−
−
−
−
1
µs
ns
ns
ns
ns
tonTXD
toffTXD
tonRXD
toffRXD
delay TXD to bus active
delay TXD to bus inactive
delay TXD to receiver active
delay TXD to receiver inactive
−
50
40
55
82
80
120
150
V8 = 1 V; VCC < 5.1 V;
Tamb < +85 °C
V8 = 1 V; VCC < 5.1 V;
Tamb < +125 °C
−
−
−
82
90
90
170
170
190
ns
ns
ns
V8 = 1 V; VCC < 5.5 V;
Tamb < +85 °C
V8 = 1 V; VCC < 5.5 V;
Tamb < +125 °C
tonRXD
delay TXD to receiver active
delay TXD to receiver inactive
R8 = 47 kΩ
R8 = 24 kΩ
R8 = 47 kΩ
R8 = 24 kΩ
R8 = 47 kΩ
−
−
−
−
−
390
260
260
210
14
520
320
450
320
−
ns
ns
toffRXD
ns
ns
SR
differential output voltage slew
rate
V/µs
tWAKE
tdRXDL
wake-up time from standby
(via pin 8)
−
−
−
−
20
3
µs
µs
bus dominant to RXD LOW
V8 = 4 V; standby mode
Standby/slope control (pin 8)
V8
input voltage for high-speed
−
−
−
−
−
−
0.3VCC
−500
−
V
I8
input current for high-speed
input voltage for standby mode
slope control mode current
slope control mode voltage
V8 = 0 V
−
µA
V
Vstb
Islope
Vslope
0.75VCC
−10
−200
0.6VCC
µA
V
0.4VCC
Note
1. I1 = I4 = I5 = 0 mA; 0 V < V6 < VCC; 0 V < V7 < VCC; V8 = VCC
.
2000 Jan 13
7

 NXP [ NXP ]
NXP [ NXP ]