Theory of Operation (Continued)
TABLE 1. System Specifications Summary (Continued)
Feedback Device
Control Algorithm
Sample Intervals
Incremental Encoder (quadrature signals; support for index pulse)
Proportional Integral Derivative (PID) (plus programmable integration limit)
*
Derivative Term: Programmable from 2048/fCLK to (2048 256)/fCLK in steps of 2048/fCLK (256
to 65,536 µs for an 8.0 MHz clock).
Proportional and Integral: 2048/fCLK
DS009219-11
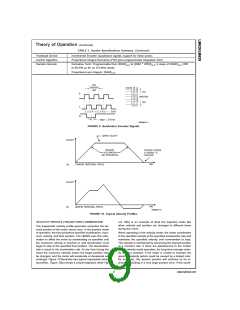
FIGURE 9. Quadrature Encoder Signals
DS009219-12
FIGURE 10. Typical Velocity Profiles
VELOCITY PROFILE (TRAJECTORY) GENERATION
ure 10(b) is an example of what the trajectory looks like
when velocity and position are changed at different times
during the move.
The trapezoidal velocity profile generator computes the de-
sired position of the motor versus time. In the position mode
of operation, the host processor specifies acceleration, maxi-
mum velocity, and final position. The LM628 uses this infor-
mation to affect the move by accelerating as specified until
the maximum velocity is reached or until deceleration must
begin to stop at the specified final position. The deceleration
rate is equal to the acceleration rate. At any time during the
move the maximum velocity and/or the target position may
be changed, and the motor will accelerate or decelerate ac-
cordingly. Figure 10 illustrates two typical trapezoidal veloc-
ity profiles. Figure 10(a) shows a simple trapezoid, while Fig-
When operating in the velocity mode, the motor accelerates
to the specified velocity at the specified acceleration rate and
maintains the specified velocity until commanded to stop.
The velocity is maintained by advancing the desired position
at a constant rate. If there are disturbances to the motion
during velocity mode operation, the long-time average veloc-
ity remains constant. If the motor is unable to maintain the
specified velocity (which could be caused by a locked rotor,
for example), the desired position will continue to be in-
creased, resulting in a very large position error. If this condi-
9
www.national.com

 NSC [ National Semiconductor ]
NSC [ National Semiconductor ]