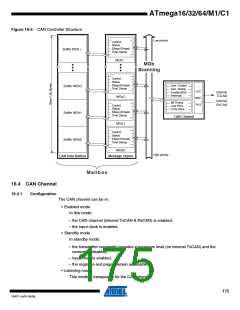
Figure 16-9. Overload Frame
Instructions
Setting OVRQ bit
Resetting OVRQ bit
OVRQ bit
OVFG bit
RXCDAN
TXCDAN
Ident "A"
Cmd
Message Data "A"
CRC
A
Interframe
Overload Frame
Overload Frame
Ident "B"
16.5 Message Objects
The MOb is a CAN frame descriptor. It contains all information to handle a CAN frame. This
means that a MOb has been outlined to allow to describe a CAN message like an object. The set
of MObs is the front end part of the “mailbox” where the messages to send and/or to receive are
pre-defined as well as possible to decrease the work load of the software.
The MObs are independent but priority is given to the lower one in case of multi matching. The
operating modes are:
– Disabled mode
– Transmit mode
– Receive mode
– Automatic reply
– Frame buffer receive mode
16.5.1
16.5.2
Number of MObs
This device has 6 MObs, they are numbered from 0 up to 5 (i=5).
Operating Modes
There is no default mode after RESET.
Every MOb has its own fields to control the operating mode. Before enabling the CAN periph-
eral, each MOb must be configured (ex: disabled mode - CONMOB=00).
Table 16-1. MOb Configuration
MOb Configuration
Reply Valid
RTR Tag
Operating Mode
0
0
x
x
x
x
0
1
x
x
0
1
0
Disabled
Tx Data Frame
0
1
Tx Remote Frame
Rx Data Frame
1
1
0
1
Rx Remote Frame
1
x
Rx Remote Frame then, Tx Data Frame (reply)
Frame Buffer Receive Mode
16.5.2.1
Disabled
In this mode, the MOb is “free”.
178
ATmega16/32/64/M1/C1
7647F–AVR–04/09

 ATMEL [ ATMEL ]
ATMEL [ ATMEL ]