TMC5130A DATASHEET (Rev. 1.14 / 2017-MAY-15)
38
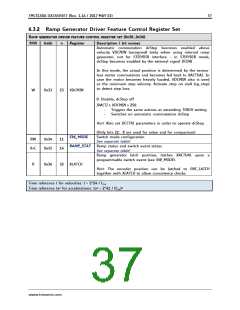
6.3.2.1 SW_MODE – Reference Switch & stallGuard2 Event Configuration Register
0X34: SW_MODE – REFERENCE SWITCH AND STALLGUARD2 EVENT CONFIGURATION REGISTER
Bit Name
Comment
11 en_softstop
0: Hard stop
1: Soft stop
The soft stop mode always uses the deceleration ramp settings DMAX, V1,
D1, VSTOP and TZEROWAIT for stopping the motor. A stop occurs when
the velocity sign matches the reference switch position (REFL for negative
velocities, REFR for positive velocities) and the respective switch stop
function is enabled.
A hard stop also uses TZEROWAIT before the motor becomes released.
Attention: Do not use soft stop in combination with stallGuard2.
1: Enable stop by stallGuard2 (also available in dcStep mode). Disable to
release motor after stop event.
10 sg_stop
Attention: Do not enable during motor spin-up, wait until the motor
velocity exceeds a certain value, where stallGuard2 delivers a stable result.
This velocity threshold should be programmed using TCOOLTHRS.
1: Latch encoder position to ENC_LATCH upon reference switch event.
1: Activates latching of the position to XLATCH upon an inactive going
edge on the right reference switch input REFR. The active level is defined
by pol_stop_r.
9
8
en_latch_encoder
latch_r_inactive
7
latch_r_active
1: Activates latching of the position to XLATCH upon an active going edge
on the right reference switch input REFR.
Hint: Activate latch_r_active to detect any spurious stop event by reading
status_latch_r.
6
5
latch_l_inactive
latch_l_active
1: Activates latching of the position to XLATCH upon an inactive going
edge on the left reference switch input REFL. The active level is defined
by pol_stop_l.
1: Activates latching of the position to XLATCH upon an active going edge
on the left reference switch input REFL.
Hint: Activate latch_l_active to detect any spurious stop event by reading
status_latch_l.
4
3
swap_lr
pol_stop_r
1: Swap the left and the right reference switch input REFL and REFR
Sets the active polarity of the right reference switch input
0=non-inverted, high active: a high level on REFR stops the motor
1=inverted, low active: a low level on REFR stops the motor
Sets the active polarity of the left reference switch input
0=non-inverted, high active: a high level on REFL stops the motor
1=inverted, low active: a low level on REFL stops the motor
1: Enables automatic motor stop during active right reference switch input
2
1
0
pol_stop_l
stop_r_enable
stop_l_enable
Hint: The motor restarts in case the stop switch becomes released.
1: Enables automatic motor stop during active left reference switch input
Hint: The motor restarts in case the stop switch becomes released.
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]