TMC5130A DATASHEET (Rev. 1.14 / 2017-MAY-15)
36
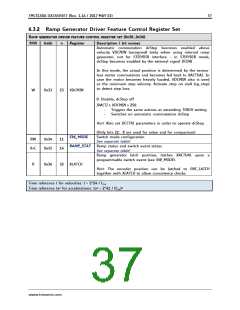
RAMP GENERATOR MOTION CONTROL REGISTER SET (0X20…0X2D)
R/W
Addr
n
Register
Description / bit names
Range [Unit]
Motor stop velocity (unsigned)
1…(2^18)-1
[µsteps / t]
Attention: Set VSTOP ≥ VSTART!
W
0x2B
18 VSTOP
Attention: Do not set 0 in positioning mode,
minimum 10 recommend!
Defines the waiting time after ramping down 0…(2^16)-1 *
to zero velocity before next movement or 512 tCLK
direction inversion can start. Time range is
about 0 to 2 seconds.
W
0x2C
16 TZEROWAIT
This setting avoids excess acceleration e.g.
from VSTOP to -VSTART.
Target position for ramp mode (signed). Write -2^31…
a new target position to this register in order +(2^31)-1
to activate the ramp generator positioning in
RAMPMODE=0.
Initialize
all
velocity,
acceleration and deceleration parameters
before.
Hint: The position is allowed to wrap around,
thus, XTARGET value optionally can be treated
as an unsigned number.
RW
0x2D
32 XTARGET
Hint: The maximum possible displacement is
+/-((2^31)-1).
Hint: When increasing V1, D1 or DMAX during
a motion, rewrite XTARGET afterwards in order
to trigger a second acceleration phase, if
desired.
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]