MCP2515
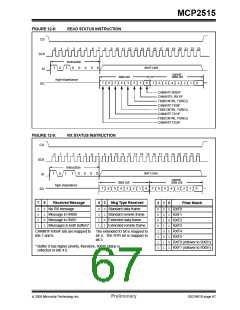
FIGURE 12-8:
READ STATUS INSTRUCTION
CS
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
SCK
instruction
don’t care
1
0
1
0
0
0
0
0
SI
repeat
data out
data out
high-impedance
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
SO
CANINTF.RX0IF
CANINTFL.RX1IF
TXB0CNTRL.TXREQ
CANINTF.TX0IF
TXB1CNTRL.TXREQ
CANINTF.TX1IF
TXB2CNTRL.TXREQ
CANINTF.TX2IF
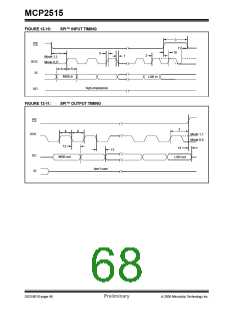
FIGURE 12-9:
RX STATUS INSTRUCTION
CS
0
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15 16 17 18 19 20 21 22 23
SCK
instruction
don’t care
repeat
1
0
1
1
0
0
0
0
SI
data out
data out
high-impedance
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
SO
7
6
Received Message
4
3
Msg Type Received
2
1
0
Filter Match
0
0
1
1
0 No RX message
1 Message in RXB0
0 Message in RXB1
0
0
1
1
0 Standard data frame
1 Standard remote frame
0 Extended data frame
1 Extended remote frame
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0 RXF0
1 RXF1
0 RXF2
1 RXF3
0 RXF4
1 RXF5
1 Messages in both buffers*
CANINTF.RXnIF bits are mapped to The extended ID bit is mapped to
bits 7 and 6.
bit 4. The RTR bit is mapped to
bit 3.
0 RXF0 (rollover to RXB1)
1 RXF1 (rollover to RXB1)
* Buffer 0 has higher priority, therefore, RXB0 status is
reflected in bits 4:0.
© 2005 Microchip Technology Inc.
Preliminary
DS21801D-page 67

 MICROCHIP [ MICROCHIP ]
MICROCHIP [ MICROCHIP ]