TC1796
Functional Description
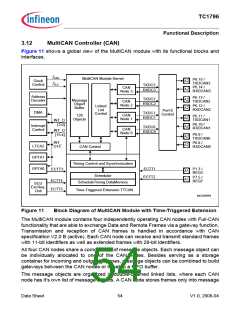
objects that are allocated to the message object list of the CAN node, and it transmits
only messages belonging to this message object list. A powerful, command-driven list
controller performs all message object list operations.
MultiCAN Features
•
CAN functionality conforms to CAN specification V2.0 B active for each CAN node
(compliant to ISO 11898)
•
•
•
•
•
•
Four independent CAN nodes
128 independent message objects (shared by the CAN nodes)
Dedicated control registers for each CAN node
Data transfer rate up to 1Mbit/s, individually programmable for each node
Flexible and powerful message transfer control and error handling capabilities
Full-CAN functionality: message objects can be individually
– Assigned to one of the four CAN nodes
– Configured as transmit or receive object
– Configured as message buffer with FIFO algorithm
– Configured to handle frames with 11-bit or 29-bit identifiers
– Provided with programmable acceptance mask register for filtering
– Monitored via a frame counter
– Configured for Remote Monitoring Mode
•
•
•
Automatic Gateway Mode support
16 individually programmable interrupt nodes
Analyzer mode for CAN bus monitoring
Data Sheet
55
V1.0, 2008-04

 INFINEON [ Infineon ]
INFINEON [ Infineon ]