TMC5160 DATASHEET (Rev. 1.08 / 2018-NOV-19)
99
17.3 dcStep Integration with the Motion Controller
dcStep requires only a few settings. It directly feeds back motor motion to the ramp generator, so
that it becomes seamlessly integrated into the motion ramp, even if the motor becomes overloaded
with respect to the target velocity. dcStep operates the motor in fullstep mode at the ramp generator
target velocity VACTUAL or at reduced velocity if the motor becomes overloaded. It requires setting
the minimum operation velocity VDCMIN. VDCMIN shall be set to the lowest operating velocity where
dcStep gives a reliable detection of motor operation. The motor never stalls unless it becomes braked
to a velocity below VDCMIN. In case the velocity should fall below this value, the motor would restart
once its load is released, unless the stall detection becomes enabled (set sg_stop). Stall detection is
covered by stallGuard2.
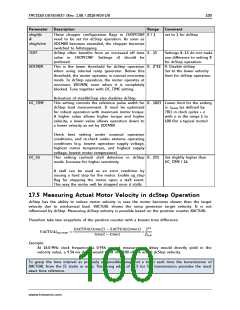
v
dcStep active
VMAX
D
X
M
overload
A
M
A
X
A
V1
D
1
1
A
VDCMIN
0
t
Nominal ramp profile
Ramp profile with torque overload and same target position
Figure 17.2 Velocity profile with impact by overload situation
Hint
dcStep requires that the phase polarity of the sine wave is positive within the MSCNT range 768 to
255 and negative within 256 to 767. The cosine polarity must be positive from 0 to 511 and negative
from 512 to 1023. A phase shift by 1 would disturb dcStep operation. Therefore it is advised to work
with the default wave. Please refer chapter 18.2 for an initialization with the default table.
17.4 Stall Detection in dcStep Mode
While dcStep is able to decelerate the motor upon overload, it cannot avoid a stall in every operation
situation. Once the motor is blocked, or it becomes decelerated below a motor dependent minimum
velocity where the motor operation cannot safely be detected any more, the motor may stall and
loose steps. In order to safely detect a step loss and avoid restarting of the motor, the stop on stall
can be enabled (set flag sg_stop). In this case VACTUAL becomes set to zero once the motor is stalled.
It remains stopped until reading the RAMP_STAT status flags. The flag event_stop_sg shows the active
stop condition. A stallGuard2 load value also is available during dcStep operation. The range of values
is limited to 0 to 255, in certain situations up to 511 will be read out. In order to enable stallGuard,
also set TCOOLTHRS corresponding to a velocity slightly above VDCMIN or up to VMAX.
Stall detection in this mode may trigger falsely due to resonances, when flywheel loads are loosely
coupled to the motor axis.
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]