TMC5130A DATASHEET (Rev. 1.14 / 2017-MAY-15)
49
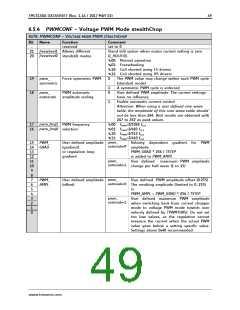
6.5.4 PWMCONF – Voltage PWM Mode stealthChop
0X70: PWMCONF – VOLTAGE MODE PWM STEALTHCHOP
Bit Name
Function
Comment
…
21
20
-
reserved
Allows different
set to 0
freewheel1
freewheel0 standstill modes
Stand still option when motor current setting is zero
(I_HOLD=0).
%00: Normal operation
%01: Freewheeling
%10: Coil shorted using LS drivers
%11: Coil shorted using HS drivers
19 pwm_
symmetric
Force symmetric PWM
0
The PWM value may change within each PWM cycle
(standard mode)
1
0
A symmetric PWM cycle is enforced
User defined PWM amplitude. The current settings
have no influence.
18 pwm_
autoscale
PWM automatic
amplitude scaling
1
Enable automatic current control
Attention: When using a user defined sine wave
table, the amplitude of this sine wave table should
not be less than 244. Best results are obtained with
247 to 252 as peak values.
pwm_freq1
pwm_freq0
17
16
PWM frequency
selection
%00: fPWM=2/1024 fCLK
%01: fPWM=2/683 fCLK
%10: fPWM=2/512 fCLK
%11: fPWM=2/410 fCLK
pwm_
15 PWM_
User defined amplitude
(gradient)
or regulation loop
gradient
Velocity dependent gradient for PWM
amplitude:
autoscale=0
GRAD
14
13
12
11
10
9
PWM_GRAD * 256 / TSTEP
is added to PWM_AMPL
pwm_
autoscale=1
User defined maximum PWM amplitude
change per half wave (1 to 15)
8
7
6
pwm_
autoscale=0
PWM_
AMPL
User defined amplitude
(offset)
User defined PWM amplitude offset (0-255)
The resulting amplitude (limited to 0…255)
is:
5
PWM_AMPL + PWM_GRAD * 256 / TSTEP
User defined maximum PWM amplitude
when switching back from current chopper
mode to voltage PWM mode (switch over
velocity defined by TPWMTHRS). Do not set
too low values, as the regulation cannot
measure the current when the actual PWM
value goes below a setting specific value.
Settings above 0x40 recommended.
4
3
2
1
pwm_
autoscale=1
0
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]