Programming manual
powerSTEP01
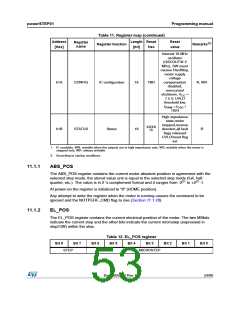
When the EL_POS register is written by the user the new electrical position is instantly
imposed. When the EL_POS register is written, its value must be masked in order to match
with the step mode selected in the STEP_MODE register in order to avoid a wrong
microstep value generation (Section 11.1.23); otherwise the resulting microstep sequence is
incorrect.
Any attempt to write the register when the motor is running causes the command to be
ignored and the NOTPERF_CMD flag to rise (Section 11.1.28).
11.1.3
11.1.4
MARK
The MARK register contains an absolute position called MARK, according to the selected
step mode; the stored value unit is equal to the selected step mode (full, half, quarter, etc.).
It is in 2's complement format and it ranges from -221 to +221-1.
SPEED
The SPEED register contains the current motor speed, expressed in step/tick (format
unsigned fixed point 0.28).
In order to convert the SPEED value in step/s the following formula can be used:
Equation 4
SPEED ⋅ 2–28
[step/s]= ------------------------------------
tick
where SPEED is the integer number stored in the register and tick is 250 ns.
The available range is from 0 to 15625 step/s with a resolution of 0.015 step/s.
The range effectively available to the user is limited by the MAX_SPEED parameter.
Note:
Any attempt to write the register causes the command to be ignored and the
NOTPERF_CMD flag to rise (Section 11.1.28).
11.1.5
ACC
The ACC register contains the speed profile acceleration expressed in step/tick2 (format
unsigned fixed point 0.40).
In order to convert the ACC value in step/s2 the following formula can be used:
Equation 5
ACC ⋅ 2–40
[step/s2]= ----------------------------
tick2
where ACC is the integer number stored in the register and tick is 250 ns.
The available range is from 14.55 to 59590 step/s2 with a resolution of 14.55 step/s2.
When the ACC value is set to 0xFFF, the device works in infinite acceleration mode.
54/90
DocID025022 Rev 1

 STMICROELECTRONICS [ ST ]
STMICROELECTRONICS [ ST ]