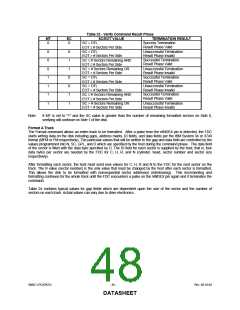
Table 25 - Interrupt Identification
SE
0
IC
11
00
INTERRUPT DUE TO
Polling
1
Normal termination of Seek or
Recalibrate command
1
01
Abnormal termination of Seek
or Recalibrate command
The Seek, Relative Seek, and Recalibrate commands have no result phase. The Sense Interrupt Status command must
be issued immediately after these commands to terminate them and to provide verification of the head position (PCN).
The H (Head Address) bit in ST0 will always return a "0". If a Sense Interrupt Status is not issued, the drive will continue
to be BUSY and may affect the operation of the next command.
Sense Drive Status
Sense Drive Status obtains drive status information. It has not execution phase and goes directly to the result phase
from the command phase. Status Register 3 contains the drive status information.
Specify
The Specify command sets the initial values for each of the three internal times. The HUT (Head Unload Time) defines
the time from the end of the execution phase of one of the read/write commands to the head unload state. The SRT
(Step Rate Time) defines the time interval between adjacent step pulses. Note that the spacing between the first and
second step pulses may be shorter than the remaining step pulses. The HLT (Head Load Time) defines the time
between when the Head Load signal goes high and the read/write operation starts. The values change with the data
rate speed selection and are documented in Table 26. The values are the same for MFM and FM.
DMA operation is selected by the ND bit. When ND is "0", the DMA mode is selected. In DMA mode, data transfers are
signaled by the DMA request cycles.
Configure
The Configure command is issued to select the special features of the FDC. A Configure command need not be issued
if the default values of the FDC meet the system requirements.
Table 26 - Drive Control Delays (ms)
HUT
SRT
2M
64
4
1M
128
8
500K 300K 250K
2M
4
1M
8
500K 300K 250K
0
1
..
E
F
256
16
426
26.7
..
512
32
16
15
..
26.7
25
32
30
..
3.75
..
7.5
..
..
..
..
..
..
56
60
112
120
224
240
373
400
448
480
0.5
0.25
1
2
3.33
1.67
4
0.5
1
2
HLT
2M
64
0.5
1
1M
128
1
500K
300K
426
3.3
250K
00
01
02
..
256
2
512
4
2
4
6.7
8
..
..
..
..
.
7F
7F
63
63.5
126
127
252
254
420
423
504
508
Configure Default Values:
EIS - No Implied Seeks
EFIFO - FIFO Disabled
POLL - Polling Enabled
FIFOTHR - FIFO Threshold Set to 1 Byte
PRETRK - Pre-Compensation Set to Track 0
EIS - Enable Implied Seek. When set to "1", the FDC will perform a Seek operation before executing a read or write
command. Defaults to no implied seek.
SMSC LPC47B27x
- 51 -
Rev. 08-10-04
DATASHEET

 SMSC [ SMSC CORPORATION ]
SMSC [ SMSC CORPORATION ]