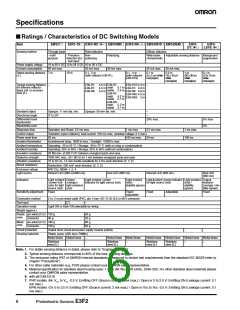
Engineering Data (Typical)
■ Operating Range (typical)
Through-beam Models (axial)
E3F2-7@4-@
Through-beam Models (axial)
E3F2-3Z@
Through-beam Models (axial)
E3F2-10@
500
400
300
200
100
300
200
typical sensing distance: 3.8 m
100
0
0
-100
-200
-300
-400
-500
–100
–200
Y
X
Y
X
–300
0
1
2
3
4
5
0
1
2
3
4
5
6
7
8
9 10 11 1213 1415 16 17
Distance X (m)
Distance X (m)
Retroreflective Models (axial)
E3F2-R2@4-@ (non polarizing)
and reflectors
Retroreflective Models (axial)
E3F2-R2Z@ (non polarizing)
and reflectors
Retroreflective Models (axial)
E3F2-R2R@4-@ (polarizing)
and reflectors
300
200
300
typical sensing distances:
typical sensing distances:
typical sensing distances:
E39-R1: 4.0 m
E39-R7: 4.5 m
E39-R8: 5.3 m
E39-R1: 3.4 m
E39-R7: 3.9 m
E39-R8: 5.2 m
E39-R1: 3.7 m
E39-R7: 4.2 m
E39-R8: 5.3 m
150
100
200
200
100
0
100
0
50
0
–50
–100
–200
–300
–100
–200
–300
–100
–150
–200
Reflector
Reflector
Reflector
Y
Y
Y
X
X
X
0
1
2
3
4
5
6
7
8
0
1
2
3
4
5
6
7
8
0
1
2
3
4
5
6
7
Distance X (m)
Distance X (m)
Distance X (m)
Retro-reflective Models (axial)
E3F2-R4@4@-@ (polarizing)
Retroreflective Models (radial)
E3F2-R2R@41-@ (polarizing)
and reflectors
250
100
Typical sensing distance
typical sensing distances:
E39-RS3
200 E39-R1S
E39-R40
E39-R1: 2.4 m
E39-R7: 2.7 m
E39-R8: 3.1 m
E39-R7
150
E39-R8
100
50
0
50
0
- 50
- 100
- 150
–50
Reflector
Reflector
Y
- 200
- 250
Y
X
X
–100
0
0.5
1
1.5
2
2.5
3
3.5
4
0
1
2
3
4
5
6
7
8
9
Distance X (m)
Distance X (m)
8
Photoelectric Sensors E3F2

 OMRON [ OMRON ELECTRONICS LLC ]
OMRON [ OMRON ELECTRONICS LLC ]