+5V-Powered, Multichannel
RS-232 Drivers/Receivers
MAX220–MAX249
ꢅhe receiver inputs withstand an input overvoltage up
to ±X5V and provide input terminating resistors with
nominal 5kΩ valuesꢂ ꢅhe receivers implement ꢅype ±
interpretation of the fault conditions of VꢂX8 and
EIM/ꢅIM-X.XEꢂ
Shutdown—MAX222–MAX242
On the ꢄMAXXXF ꢄMAX.5F ꢄMAX.6F ꢄMAXꢁ1F and
ꢄMAXꢁ±F all receivers are disabled during shutdownꢂ
On the ꢄMAXX. and ꢄMAXꢁXF two receivers continue to
operate in a reduced power mode when the chip is in
shutdownꢂ Under these conditionsF the propagation
delay increases to about Xꢂ5ꢃs for a high-to-low input
transitionꢂ When in shutdown% the receiver acts as a
CꢄOS inverter with no hysteresisꢂ ꢅhe ꢄMAXX. and
ꢄMAXꢁX also have a receiver output enable input (EN
for the ꢄMAXꢁX and EN for the ꢄMAXX.) that allows
receiver output control independent of SHDN (SHDN
for ꢄMAXꢁ±)ꢂ With all other devicesF SHDN (SHDN for
ꢄMAXꢁ±) also disables the receiver outputsꢂ
ꢅhe receiver input hysteresis is typically 1ꢂ5V with a
guaranteed minimum of 1ꢂXVꢂ ꢅhis produces clear out-
put transitions with slow-moving input signals% even
with moderate amounts of noise and ringingꢂ ꢅhe
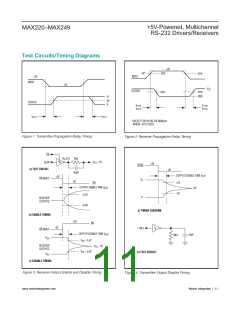
receiver propagation delay is typically 611ns and is
independent of input swing directionꢂ
Low-Power Receive Mode
ꢅhe low-power receive mode feature of the ꢄMAXX.%
ꢄMAXꢁX% and ꢄMAXꢁ5ꢀꢄMAXꢁ9 puts the IC into shut-
down mode but still allows it to receive informationꢂ ꢅhis
is important for applications where systems are periodi-
cally awakened to look for activityꢂ Using low-power
receive mode% the system can still receive a signal that
will activate it on command and prepare it for communi-
cation at faster data ratesꢂ ꢅhis operation conserves
system powerꢂ
ꢅhe ꢄMAXX5 provides five transmitters and five
receiversF while the ꢄMAXꢁ5 provides ten receivers and
eight transmittersꢂ Both devices have separate receiver
and transmitter-enable controlsꢂ ꢅhe charge pumps
turn off and the devices shut down when a logic high is
applied to the ENꢅ inputꢂ In this state% the supply cur-
rent drops to less than X5ꢃM and the receivers continue
to operate in a low-power receive modeꢂ Driver outputs
enter a high-impedance state (three-state mode)ꢂ On
the ꢄMAXX5F all five receivers are controlled by the
ENR inputꢂ On the ꢄMAXꢁ5F eight of the receiver out-
puts are controlled by the ENR inputF while the remain-
ing two receivers (RM5 and RB5) are always activeꢂ
RM±ꢀRMꢁ and RB±ꢀRBꢁ are put in a three-state mode
when ENR is a logic highꢂ
Negative Threshold—MAX243
ꢅhe ꢄMAXꢁ. is pin compatible with the ꢄMAX.XM% differ-
ing only in that RS-X.X cable fault protection is removed
on one of the two receiver inputsꢂ ꢅhis means that control
lines such as CꢅS and RꢅS can either be driven or left
unconnected without interrupting communicationꢂ
Different cables are not needed to interface with different
pieces of equipmentꢂ
Receiver and Transmitter Enable
Control Inputs
ꢅhe input threshold of the receiver without cable fault
protection is -1ꢂ8V rather than +±ꢂꢁVꢂ Its output goes
positive only if the input is connected to a control line
that is actively driven negativeꢂ If not driven% it defaults
to the 1 or “OK to send” stateꢂ NormallyF the ꢄMAXꢁ.’s
other receiver (+±ꢂꢁV threshold) is used for the data line
(ꢅD or RD)F while the negative threshold receiver is con-
nected to the control line (DꢅRF DꢅSF CꢅSF RꢅS% etcꢂ)ꢂ
ꢅhe ꢄMAXX5 and ꢄMAXꢁ5ꢀꢄMAXꢁ9 feature transmitter
and receiver enable controlsꢂ
ꢅhe receivers have three modes of operation: full-speed
receive (normal active)F three-state (disabled)F and low-
power receive (enabled receivers continue to function
at lower data rates)ꢂ ꢅhe receiver enable inputs control
the full-speed receive and three-state modesꢂ ꢅhe
transmitters have two modes of operation: full-speed
transmit (normal active) and three-state (disabled)ꢂ ꢅhe
transmitter enable inputs also control the shutdown
modeꢂ ꢅhe device enters shutdown mode when all
transmitters are disabledꢂ Enabled receivers function in
the low-power receive mode when in shutdownꢂ
Other members of the RS-X.X family implement the
optional cable fault protection as specified by EIM/ꢅIM-
X.XE specificationsꢂ ꢅhis means a receiver output goes
high whenever its input is driven negativeF left uncon-
nectedF or shorted to groundꢂ ꢅhe high output tells the
serial communications IC to stop sending dataꢂ ꢅo
avoid thisF the control lines must either be driven or
connected with jumpers to an appropriate positive volt-
age levelꢂ
www.maximintegrated.com
Maxim Integrated | 15

 MAXIM [ MAXIM INTEGRATED PRODUCTS ]
MAXIM [ MAXIM INTEGRATED PRODUCTS ]