TMCM-3314, TMCM-3315 Hardware Manual (V0.92 / 2016-SEP-20)
28
11TMCM-3315 Functional Description
The TMCM-3315 is a highly integrated controller/driver module for 3 stepper motor axes with (optional) closed-
loop operation. The unit offers an EtherCAT™ interface in addition to USB for communication. The nominal supply
voltage of the unit is 24V or 48V DC. Full remote control of the device with feedback is possible using the
CANopen over EtherCAT™ (CoE) firmware. The firmware of the module can be updated via one of the serial
interfaces.
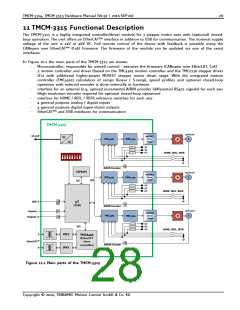
In Figure 10.1 the main parts of the TMCM-3315 are shown:
-
-
Microcontroller, responsible for overall control - executes the firmware (CANopen over EtherCAT, CoE)
3 motion controller and driver (based on the TMC4361 motion controller and the TMC2130 stepper driver
ICs) with additional higher-power MOSFET stepper motor driver stage. With the integrated motion
controller (TMC4361) calculation of ramps (linear / S-ramp), speed profiles and optional closed-loop
operation with external encoder is done internally in hardware
-
interface for an external (e.g. optical) incremental A/B/N encoder (differential RS422 signals) for each axis
(High-resolution encoder required for optional closed-loop operation)
interface for HOME / REFL / REFR reference switches for each axis
4 general purpose analog / digital inputs
4 general purpose digital (open-drain) outputs
-
-
-
-
EtherCAT™ and USB interfaces for communication
TMCM-3315
optional
18..53V
MOSFET
Driver
Stage
DC
TMC2130
TMC2130
TMC2130
TMC4361
E
DC
+5V
+5V
+5V
HOME, REFL, REFR
HOME, REFL, REFR
HOME, REFL, REFR
A/B/N Encoder
TMC4361
EEPROM
I2C
optional
MOSFET
Driver
Stage
E
SPI
+5V
+5V
+5V
USB
µC
(ARM)
A/B/N Encoder
TMC4361
optional
Inputs
MOSFET
Driver
Stage
E
Outputs
+5V
+5V
+5V
SPI
PHY
PHY
TMC8460
(EtherCAT
slave
EtherCATTM
A/B/N Encoder
controller)
Figure 11.1 Main parts of the TMCM-3315
Copyright © 2016, TRINAMIC Motion Control GmbH & Co. KG

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]