TMC223 DATASHEET (V. 1.05 / March 7, 2011)
5
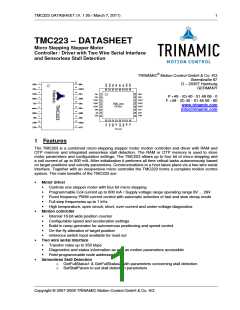
2 General Description
2.1 Block Diagramm
SWI
OA1
OA2
PWM
regulator
X
SDA
SCL
Two Wire
Serial
Interface
Decoder
Position Controller
Sinewave
table
Serial
Interface
Controller
HW
OB1
OB2
PWM
regulator
Y
DACs
Main control
& Registers
TST
Test
OTP + ROM
VBAT
VDD
Voltage
Regulator
Oscillator
Reference Voltage
&
Thermal Monitoring
Charge
Pump
VCP CP2 CP1
2.2 Position Controller / Main Control
Motor parameters, e.g. acceleration, velocity and position parameters are passed to the main control
block via the serial interface. These information are stored internally in RAM or OTP memory and are
accessible by the position controller. This block takes over all time critical tasks to drive a stepper
motor to the desired position under abiding the desired motion parameters.
The main controller gets feedback from the stepper motor driver block and is able to arrange internal
actions in case of possible problems. Diagnostics information about problems and errors are
transferred to the serial interface block.
2.3 Stepper Motor Driver
Two H-bridges are employed to drive both windings of a bipolar stepper motor. The internal transistors
can reach an output current of up to 800 mA. The PWM principle is used to force the given current
through the coils. The regulation loop performs a comparison between the sensed output current and
the internal reference. The PWM signals to drive the power transistors are derived from the output of
the current comparator.
2.4 Two Wire Serial Interface
Communication between a host and the TMC223 takes places via the two wire bi-directional serial
interface. Motion instructions and diagnostics information are provided to or from the Main Control
block. It is possible to connect up to 32 devices on the same bus. Slave addresses are programmable
via OTP memory or an external pin.
Copyright © 2007-2009 TRINAMIC Motion Control GmbH & Co. KG

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]