TMC2160 DATASHEET (Rev. 1.02 / 2018-NOV-19)
49
Quick Start
For a quick start, see the Quick Configuration Guide in chapter 18.
6.3.1 Lower Current Limit
The stealthChop current regulator imposes a lower limit for motor current regulation. As the coil
current can be measured in the shunt resistor during chopper on phase only, a minimum chopper
duty cycle allowing coil current regulation is given by the blank time as set by TBL and by the
chopper frequency setting. Therefore, the motor specific minimum coil current in stealthChop
autoscaling mode rises with the supply voltage and with the chopper frequency. A lower blanking
time allows a lower current limit. It is important for the correct determination of PWM_OFS_AUTO,
that in AT#1 the run current set by the sense resistor, GLOBALSCALER and IRUN is well within the
regulation range. Lower currents (e.g. for standstill power down) are automatically realized based on
PWM_OFS_AUTO and PWM_GRAD_AUTO respectively based on PWM_OFS and PWM_GRAD with non-
automatic current scaling. The freewheeling option allows going to zero motor current.
Lower motor coil current limit for stealthChop2 automatic tuning:
푉푀
퐼퐿ꢂ푤푒ꢃ 퐿ꢄ푚ꢄ푡 = ꢅ퐵퐿퐴푁퐾 ∗ 푓
∗
ꢆ푊푀
푅퐶푂ꢇ퐿
With VM the motor supply voltage and RCOIL the motor coil resistance.
ILower Limit can be treated as a thumb value for the minimum nominal IRUN motor current setting. In
case the lower current limit is not sufficient to reach the desired setting, the driver will retry with a
lower chopper frequency in step AT#1, only.
fPWM is the chopper frequency as determined by setting PWM_FREQ. In AT#1, the driver tries a lower,
(roughly half frequency), in case it cannot reach the current. The frequency will remain active in
standstill, while currentscale CS=IRUN. With automatic standstill reduction, this is a short moment.
EXAMPLE:
A motor has a coil resistance of 5Ω, the supply voltage is 24V. With TBL=%01 and PWM_FREQ=%00,
tBLANK is 24 clock cycles, fPWM is 2/(1024 clock cycles):
2
24푉
24 24푉
∗ = 225ꢈꢉ
퐼퐿ꢂ푤푒ꢃ 퐿ꢄ푚ꢄ푡 = 24 ꢅ퐶퐿퐾
∗
∗
=
1024 ꢅ퐶퐿퐾 5Ω
512 5Ω
This means, the motor target current for automatic tuning must be 225mA or more, taking into
account all relevant settings. This lower current limit also applies for modification of the motor
current via the GLOBALSCALER.
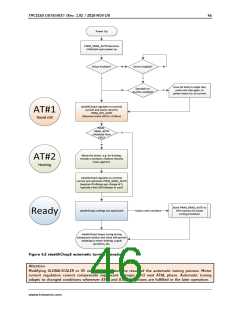
Attention
For automatic tuning, a lower coil current limit applies. The motor current in automatic tuning phase
AT#1 must exceed this lower limit. ILOWER LIMIT can be calculated or measured using a current probe.
Setting the motor run-current or hold-current below the lower current limit during operation by
modifying IRUN and IHOLD is possible after successful automatic tuning.
The lower current limit also limits the capability of the driver to respond to changes of
GLOBALSCALER.
6.4 Velocity Based Scaling
Velocity based scaling scales the stealthChop amplitude based on the time between each two steps,
i.e. based on TSTEP, measured in clock cycles. This concept basically does not require a current
measurement, because no regulation loop is necessary. A pure velocity based scaling is available via
www.trinamic.com

 TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]
TRINAMIC [ TRINAMIC MOTION CONTROL GMBH & CO. KG. ]