TPS54360
SLVSBB4C –AUGUST 2012–REVISED OCTOBER 2012
www.ti.com
APPLICATION INFORMATION
Design Guide — Step-By-Step Design Procedure
This guide illustrates the design of a high frequency switching regulator using ceramic output capacitors. A few
parameters must be known in order to start the design process. These requirements are typically determined at
the system level. For this example, we will start with the following known parameters:
Output Voltage
5 V
Transient Response 0.875 A to 2.625 A load step
Maximum Output Current
Input Voltage
ΔVOUT = 4 %
3.5 A
12 V nom. 8.5 V to 60 V
0.5% of VOUT
8 V
Output Voltage Ripple
Start Input Voltage (rising VIN)
Stop Input Voltage (falling VIN)
6.25 V
Selecting the Switching Frequency
The first step is to choose a switching frequency for the regulator. Typically, the designer uses the highest
switching frequency possible since this produces the smallest solution size. High switching frequency allows for
lower value inductors and smaller output capacitors compared to a power supply that switches at a lower
frequency. The switching frequency that can be selected is limited by the minimum on-time of the internal power
switch, the input voltage, the output voltage and the frequency foldback protection.
Equation 7 and Equation 8 should be used to calculate the upper limit of the switching frequency for the
regulator. Choose the lower value result from the two equations. Switching frequencies higher than these values
results in pulse skipping or the lack of overcurrent protection during a short circuit.
The typical minimum on time, tonmin, is 135 ns for the TPS54360. For this example, the output voltage is 5 V and
the maximum input voltage is 60 V, which allows for a maximum switch frequency up to 710 kHz to avoid pulse
skipping from Equation 7. To ensure overcurrent runaway is not a concern during short circuits use Equation 8 to
determine the maximum switching frequency for frequency foldback protection. With a maximum input voltage of
60 V, assuming a diode voltage of 0.7 V, inductor resistance of 25 mΩ, switch resistance of 92 mΩ, a current
limit value of 4.7 A and short circuit output voltage of 0.1 V, the maximum switching frequency is 902 kHz.
For this design, a lower switching frequency of 600 kHz is chosen to operate comfortably below the calculated
maximums. To determine the timing resistance for a given switching frequency, use Equation 5 or the curve in
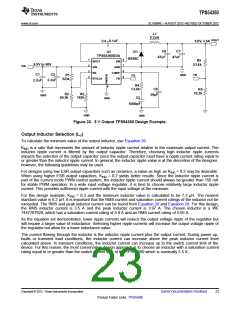
Figure 6. The switching frequency is set by resistor R3 shown in Figure 33. For 600 kHz operation, the closest
standard value resistor is 162 kΩ.
1
3.5 A x 25 mW + 5 V + 0.7 V
60 V - 3.5 A x 92 mW + 0.7 V
æ
ö
fSW(maxskip)
=
´
= 710 kHz
ç
÷
135ns
è
ø
(23)
(24)
(25)
8
4.7 A x 25 mW + 0.1 V + 0.7 V
60 V - 4.7 A x 92 mW + 0.7 V
æ
ö
fSW(shift)
=
´
= 902 kHz
ç
÷
135 ns
è
ø
92417
600 (kHz)0.991
RT (kW) =
= 163 kW
22
Submit Documentation Feedback
Copyright © 2012, Texas Instruments Incorporated
Product Folder Links: TPS54360

 TI [ TEXAS INSTRUMENTS ]
TI [ TEXAS INSTRUMENTS ]